-

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备 14
14
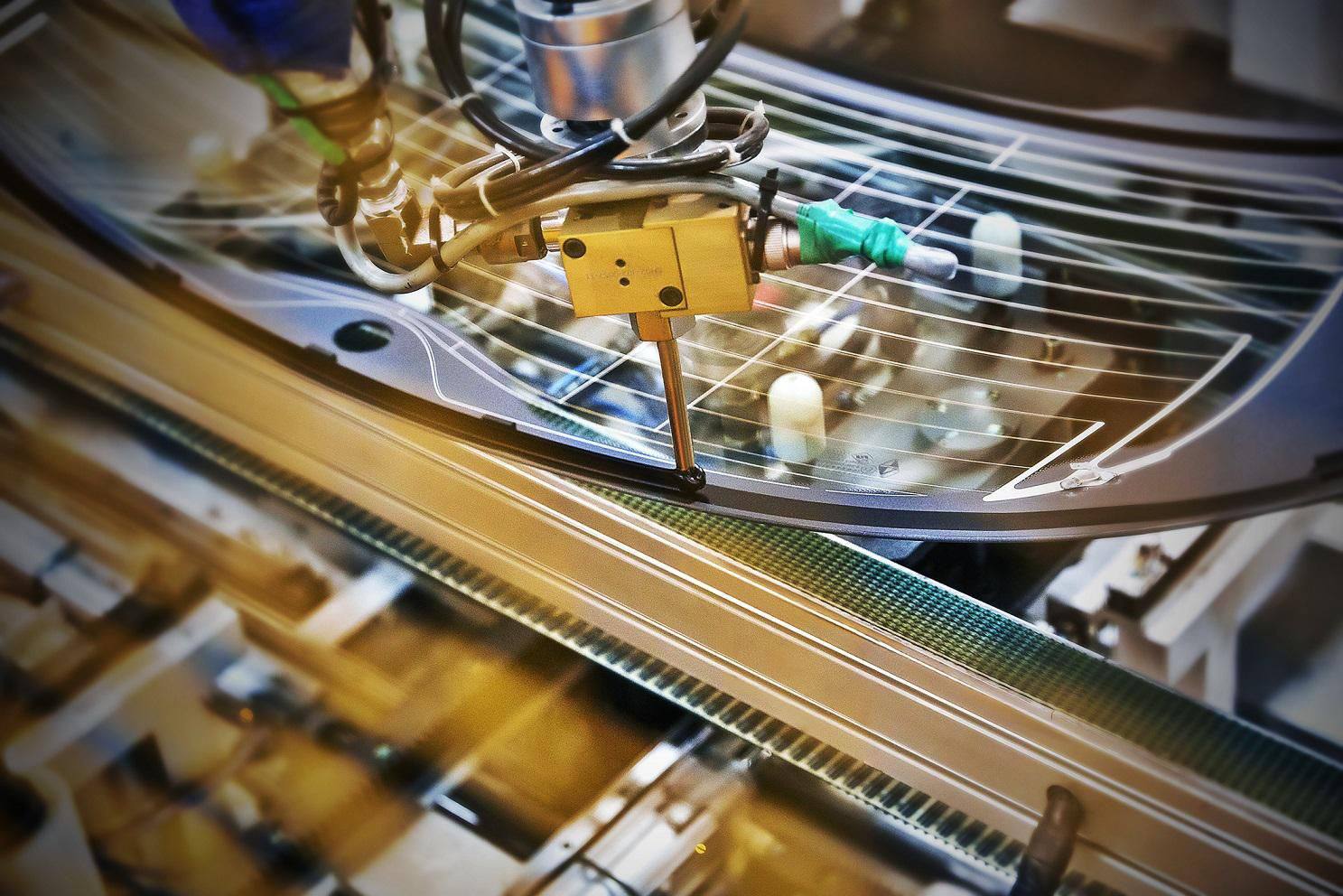
机器人涂胶系统是来实现汽车的顶棚横梁和发动机盖的不同型号工件的涂胶工作,首先根据胶枪的重量来选择机器人系统的负载能力,一般来说,此种胶枪的重量不会很重,所以只要选择轻负载能力的导轨系统即可。但是由于工件的数量比较多,涂点的数量也很多,这就要选择一个高速的涂胶系统,而这正是涂胶系统所具备的特性。能够快速响应市场需求,通过程序调试来应对新车型或者NVH设计修改,生产柔性高,适用于大批量生产,提高生产效率;
机器人可稳定生产,降低生产节拍,质量更加稳定;
线边无零件库存及物流,且水基涂料环境污染小,避免由阻尼垫带来的灰尘污染;
改善的阻尼材料性能,阻尼系数高,可显著减少传递到乘客舱的噪声;
重量降低,利于车身轻量化;
系统工作流程如下:
1) 车身进入涂胶工位前,通过光电传感器进行车型识别,并将识别结果和RFID获取的车型信息进行对比,如果不一致,操作工人通过GUI界面手动输入车型;
2) 车身进入涂胶工位后,视觉系统对车体进行拍照,获取车体在机运线上的空间位置偏移数据;
3) 涂胶机器人对相应的涂胶程序进行偏移后开始涂胶;
4) 涂胶完成后,机器人各自发出涂胶结束信号至系统总控PLC,机运线将车身移出工位,并等待下一车身到来;
5) 循环反复。
整个系统可以实现工位配置设置、视觉相机拍照、工艺参数设置、过程监控、机器人状态监控、供胶维护、停机报告、报警记录等功能,借助FTP协议实现与机器人控制系统的文件传输。