-

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备 14
14

工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲**动。
工业机器人显著的特点有以下几个:
(1)可编程。生产自动化的进一步发展是柔性启动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。
(2)拟人化。工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应能力。
(3)通用性。除了专门设计的的工业机器人外,一般工业机器人在执行不同的作业任务时具有较好的通用性。比如,更换工业机器人手部末端操作器(手爪、工具等)便可执行不同的作业任务。
(4)工业机器技术涉及的学科相当广泛,归纳起来是机械学和微电子学的结合-机电一体化技术。*三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是计算机技术的应用密切相关。因此,机器人技术的发展必将带动其他技术的发展,机器人技术的发展和应用水平也可以验证一个国家科学技术和工业技术的发展水平。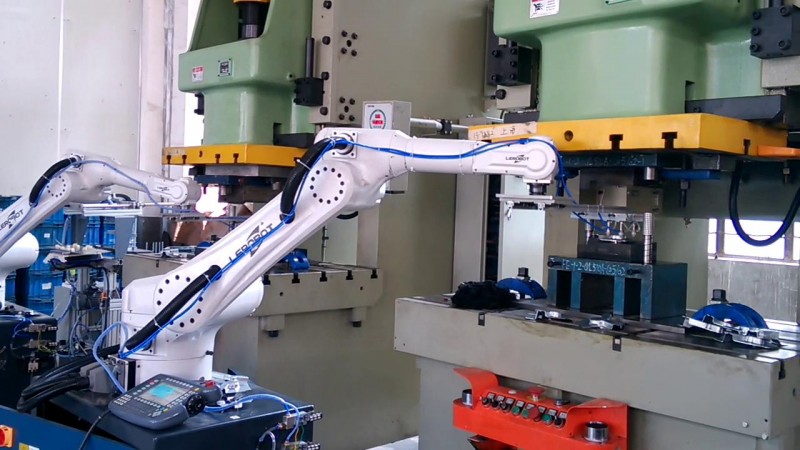
关节式机器人
1、机器人工作范围(回转半径) :620mm-3503mm
2、机器人负载能力:3kg-700kg
3、机器人工作节拍:大于等于3秒
4、定位精度:±0.1mm
5、驱动形式:全伺服驱动
6、手爪驱动:气动或者电动,根据工件不同定制,自动换爪功能
7、编程方式:示教编程, AS语言编程
8、料仓/输送线:根据工件不同定制
料斗式上料装置的必要组成部分,用以容纳成堆散乱的工件,其容量通常能持续供料1小时以上。料斗上装有各种形式的定向机构。料斗的主要类型**械传动式料斗和振动料斗。