-

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备 14
14

控制系统要满足以下几点要求:
(1)机器人能够在该系统中实施上下料动作;
(2)有*的安全防护措施;
(3)能够模拟机床信号发给机器人;
(4)模块化实训设备,机器人夹具能够更换;
(5)带有人机界面和PLC控制系统。
设计特点:
1、桁架机械手位于数控车床主轴正上方位,桁架X轴Z轴长度根据客户机床实际测量长度、送料深度而定;
2、机械手采用全钢结构精加工处理,承载强,刚性好,具高强度防震功能,低噪音;并自带注油系统,确保运行顺畅;
3、进口伺服电机、减速机、直线导轨、齿轮齿条配置,确保重复精度高、长期稳定使用;
4、机械手末端采用气爪带旋转机构;气爪带自锁功能,防断电断气松脱功能;
5、自动送料到位检测,避免撞车、打刀等情况发生,加工安全可靠;
6、机械手夹爪末端和机床内部增加吹气装置,确保将卡盘上切屑自动吹干净,保证装夹质量
7、桁架机械手采用控制系统与机床控制系统协调联动,采用触摸屏操作界面,进行各项参数设定。该系统调试方便,简单易学;
8、机械手采用多处光电传感技术,提醒操作人员及**操作安全。
9、机械手安装改造过程中不改变机床原有工艺;可以实现自动和人工切换作业;(机床上部要开口改造,门要改造成气缸式自动移门,卡盘如原来是液压的不需要做改造)
10、机械手重复定位精度准确;产品换型时间短;每道产品上下料时间快;
11、机械手整体设计大气、美观、平稳、安全,噪音低;
12、根据工艺需要,我司可开发加工产品在线检测功能,包括视觉检测、接触式检测、激光检测等手段,实现加工产品质量的实时监测;
采用模块化设计,使用独立的、以ARM处理器为核心的智能控制系统;主体横梁、竖臂采用钢梁结构,强化了整体刚性;各模块在机械上彼此相对独立,可以在一定范围内进行组合而不需要重新设计和制造,可根据客户产品工艺要求组合成双臂、多臂等形式;主要应用于汽车零配件、仪器仪表、精密机械等机械加工领域。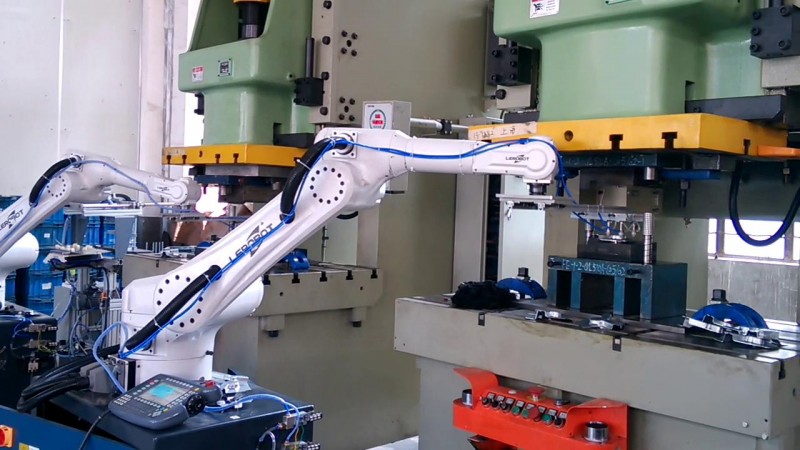
用小型数控机床组建工业机器人上下料教学系统
利用小型数控机床与工业机器人实现自动上下料教学工作站的设计及制作,整个机器人上下料教学平台系统由一台工业6轴高速机器人、一台小型数控车床、一台小型数控铣床(或小型加工中心),以及工件的夹具抓取手抓、周边设备及系统控制器等组成。该系统在不影响实训功能的前提下采用小型数控机床为加工单元代替昂贵的大型加工中心,实现机器人上下料工作站系统的编程、上下料系统的集成、PLC系统编程、总线通讯等实训环节。