-

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备 14
14

工作站(单元)
如果工件在整个焊接过程中*变位,就可以用夹具把工件定位在工作台面上,这种系统既是简单不过的了。但在实际生产中,更多的工件在焊接时需要变位,使焊缝处在较好的位置(姿态)下焊接。对于这种情况,变位机与机器人可以是分别运动,即变位机变位后机器人再焊接;也可以是同时运动,即变位机一边变位,机器人一边焊接,也就是常说的变位机与机器人协调运动。这时变位机的运动及机器人的运动复合,使焊枪相对于工件的运动既能满足焊缝轨迹又能满足焊接速度及焊枪姿态的要求。实际上这时变位机的轴已成为机器人的组成部分,这种焊接机器人系统可以多达7-20个轴,或更多。的机器人控制柜可以是两台机器人的组合作12个轴协调运动。其中一台是焊接机器人、另一台是搬运机器人作变位机用。
公司竭力推崇现代企业管理理念,产品全部按照ISO国际质量认证体系标准进行设计、生产、组装和检测。我们公司拥有现代化一体生产组装车间和专门的研发实验中心。在生产的过程中,公司实行6S管理,生产流程实行优化控制,质量方针实行一票否决制。我们的生产车间拥有先进的大型立式车床、卧式车床、刨床、镗床、磨床、铣床及数控机床等,加工、制造实力雄厚。
凭借多年积累的宝贵经验,鹏泰公司能够帮助您的企业实现成功。我们以工程实践为基础,加上丰富的行业经验和专业技术以及应用实例,可以帮助您的企业部署各种自动化技术,以提高整个工厂的水平。无论是单独应用还是整套生产流程,鹏泰都能够为您提供所需的解决方案来提高工厂生产效率。
本公司以“减少客户设备故障待机时间及备件库存,降低企业设备运行维护成本”为宗旨,秉承“开拓创新、追求、感动客户、服务社会”的思想理念,奉行“和谐、诚信、快速、共赢”的经营行为,坚持“质量,客户至上”的信条,始终致力于工业自动化领域的科技创新,为客户提供快捷、稳定的优质服务,为**和提高客户的生产自动化水平与效率贡献力量。
点焊对焊接机器人的要求不是很高。因为点焊只需点位控制,至于焊钳在点与点之间的移动轨迹没有严格要求,这也是机器人早只能用于点焊的原因。点焊用机器人不仅要有足够的负载能力,而且在点与点之间移位时速度要快捷,动作要平稳,定位要准确,以减少移位的时间,提高工作效率。点焊机器人需要有多大的负载能力,取决于所用的焊钳形式。对于用与变压器分离的焊钳,30~45kg负载的机器人就足够了。但是,这种焊钳一方面由于二次电缆线长,电能损耗大,也不利于机器人将焊钳伸入工件内部焊接;另一方面电缆线随机器人运动而不停摆动,电缆的损坏较快。因此,目前逐渐增多采用一体式焊钳。这种焊钳连同变压器质量在70kg左右。考虑到机器人要有足够的负载能力,能以较大的加速度将焊钳送到空间位置进行焊接,一般都选用100~150kg负载的重型机器人。为了适应连续点焊时焊钳短距离快速移位的要求。新的重型机器人增加了可在0.3s内完成50mm位移的功能。这对电机的性能,微机的运算速度和算法都提出更高的要求。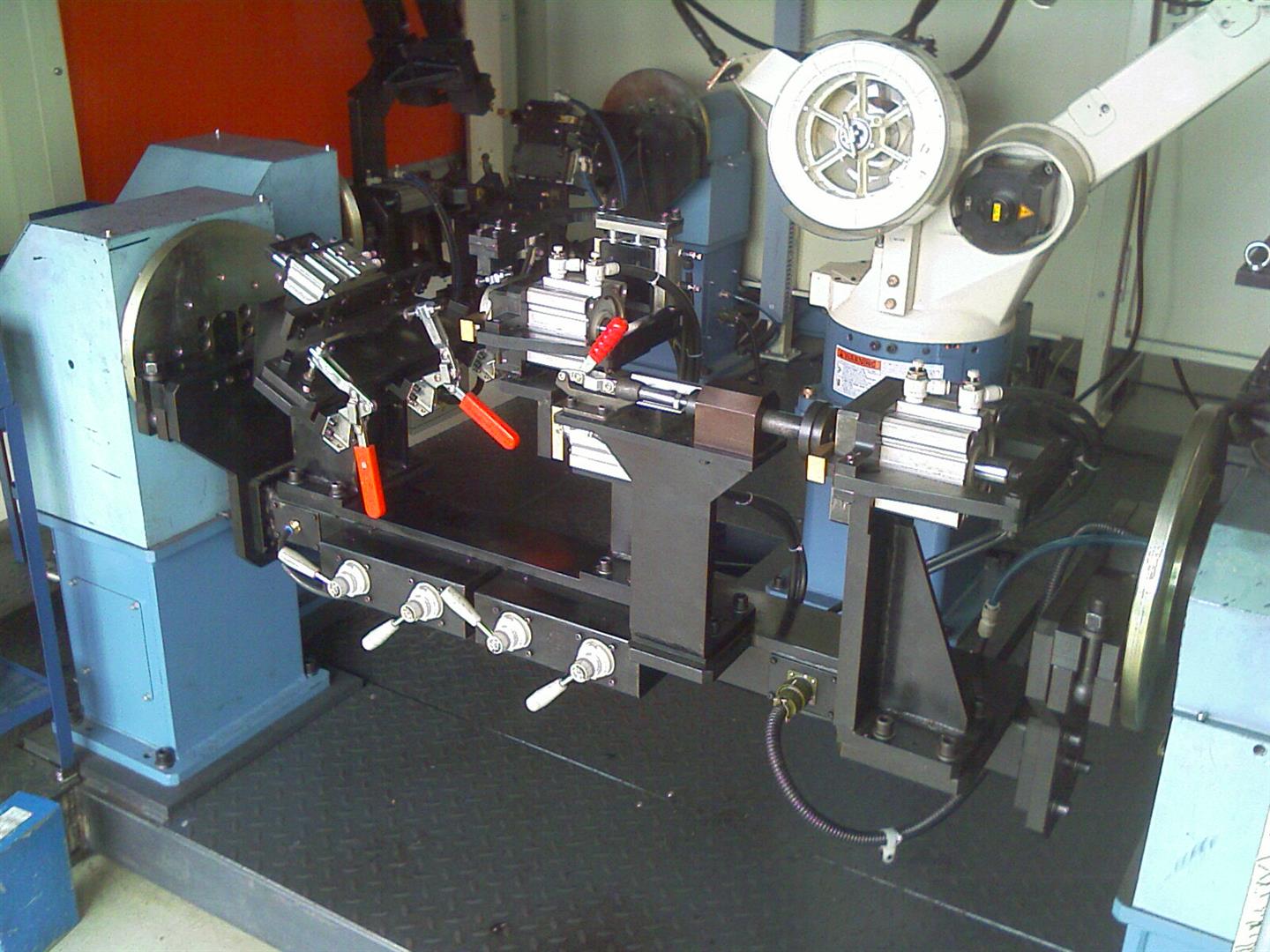
由于所设计的焊接机器人是在准平面、空间狭窄的环境下工作,为了保证机器人能根据电弧传感器的偏差信息,跟踪焊缝自动焊接,要求所设计的机器人应该结构紧凑、移动灵活且工作稳定.文中针对狭窄空间特点,开发了一种小型移动焊接机器人,根据机器人各结构的运动特点,运用模块化设计方法,把机器人机构分为轮式移动平台、焊炬调节机构和电弧传感器三部分。其中,轮式移动平台由于其惯性大,响应慢,主要对焊缝进行粗跟踪,焊炬调节机构负责焊缝精确跟踪,电弧传感器完成焊缝偏差实时识别.另外,机器人控制器和电机驱动器集成安装于机器人移动平台上,使其体积更小。同时,为了减少恶劣焊接环境下粉尘对运动部件影响,采用全封闭式结构,提高其系统可靠性 [1] 。
http://syqdjd.cn.b2b168.com
欢迎来到沈阳鹏泰工业装备有限公司网站, 具体地址是辽宁省沈阳铁西区浑河十一街3-36号,联系人是艾晗。
主要经营沈阳鹏泰工业装备有限公司位专业从事机器人焊接,码垛,喷涂,折弯,搬运,切割,焊缝跟踪,电阻焊专机等自动化电阻焊专机设备,弧焊点焊专机等一系列自动化工程的研发与制造。。
单位注册资金单位注册资金人民币 100 万元以下。
欢迎关注本公司,本公司专业经营焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备等产品,拥有完善的技术和真诚的服务!