-

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备 15
15

机器人码垛机是电、机一体化的**产品,而中、低位的码垛机器人可以满足中低产量的需求。它还可按照要求的编组方式和层数,完成对料袋、胶块、箱体等各种产品的码垛。它主要由机械主体、伺服驱动系统、手臂机构、末端执行器、末端执行器调节机构以及检测机构组成,可按照不同的物料包装、堆垛顺序、进行参数设置,实现不同类型包装物料的码垛作业。按功能划分为进袋、转向、排袋、编组、抓袋码垛、托盘库、托盘输送以及相应的控制系统等机构。
机器人码垛机
(1)进袋机构。采用皮带输送机完成码垛机供袋任务。
(2)转向机构。按设定程序对包装袋作转向编排。
(3)排袋机构。采用皮带输送机将编排好的包装袋送至积袋机构。
(4)积袋机构。采用皮带输送机集中编排好的包装袋。
(5)抓袋码垛机构。采用机器人码垛机构完成码垛作业。
(6)托盘库。成叠的托盘由叉车送人,按程序逐个排放至托盘辊道输送机,有规律地向码垛工序供应空托盘,达到8层后的成垛托盘,由辊道输送机输送至成垛托盘库,后由叉车取出送至仓库贮存,系统采用可编程序控制器(brLC)控制。
在科技的快速发展下采用人力来进行一些批量及大型产品的制造,显然不能满足企业的需求。由此,台机器人诞生在20世纪60年代诞生了,至今经过多年的研究和完善,尤其是工业机器人,逐步被应用到多种领域,例如制造业、医疗、物流、汽车、太空和潜水等。
工业机器人的发展解决了很多人力所不及的问题,而且生产效率也是人力所不能够比拟的,无形中节约了劳动成本,提高了生产效益。美国机器人工业协会把机器人定义为“用来搬运材料、零件、工具等可再编程的多功能机械手,或者通过不同程序的调试,来完成各种工作任务的特种装备”。对于一个国家来说,机器人的存有量在一定程度上反应了国家生产力的发展水平。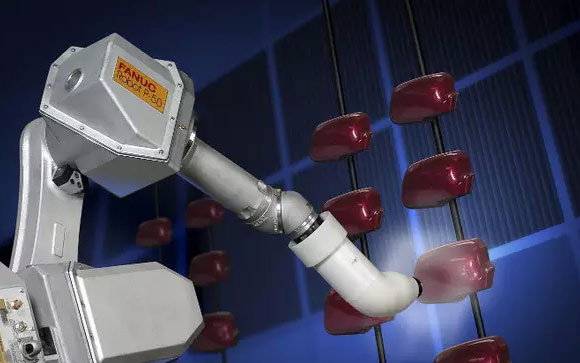
装配机器人的大量作业是轴与孔的装配,在轴与孔存在误差的情况下进行装配,需要机器人具有动作的柔顺性。主动柔顺性是根据传感器反馈的信息调整机器人手部动作,而从动柔顺心则利用不带动力的机构来控制手爪的运动以补偿其位置误差。
装配机器人主要用于各种电器制造,(包括家用电器,如电视机,录音机,洗衣机等)小型电机,汽车及其部件,计算器,玩具,机电产品及组件的装配等方面。
装配机器人是柔性自动化装配系统的核实设备,由机器人操作机,控制器,末端执行器和传感器系统组成,机器人的结构类型有水平关节型,直角坐标性,多关节型和圆柱坐标型等;控制器一般采用多CPU或多级计算器系统,实现运动控制和运动编程;末端执行器为适应不同的装配对象而设计成各种手爪和手腕等;传感器系统又来获取装配机器人与环境和装配对象之间相互用的信息。
装配机器人特点:
1.每台组装机器人手臂可根据工艺需要配备不同工装,以满足未来生产线多批次,小批量的多样生产要求,只需要简单的编程及工装更换即可实现快速切换。
2.机器人的高精度与作业的稳定性,可用于精益工业生产过程。
3.视觉功能,引导机器人正确识别和抓取工件,传送到精确装配位置。
4.机器人投入产出比高,设备回收期短。
1.焊接机器人的可行性分析。 考虑焊接件是否是标准的,焊接厚度是否满足焊接要求,焊接量等。
2.或更普通的焊接机器人,如果用户长时间只焊接焊接部件,可以考虑特殊焊接设备,如果需要考虑其他焊接部件,可以考虑更通用的自动焊接 设备。
3.坚持“适用是好的”原则,采用直缝焊接,如果使用6轴机器人进行长时间焊接,则有点矫枉过正。
4.如果焊接过程未知,焊接效果和焊接效率可通过试焊验证。
5.对于价格,用户可以到处逛逛,对于同一产品的焊接,如设备价格变化太大,可以通过机械配置,厂家实力,售后条款,焊接效率等方面进行权衡。
如果用户遇到某个焊接件,他将确保能够自动焊接回复。 如果你是同一个产品,切割方法不同,厚度不一样,其他人的焊接并不代表你。 它可以自动焊接。氩弧焊自动焊接设备和模具的生产离不开焊接技术的长期经验。 同样的设备,不同的人培训和售后,效果是不一样的。
焊接过程中焊接机器人的速度是多少?
根据具体焊接规范,焊丝等埋弧焊为4.0,一般焊接速度为350-500mm / min,即35-50cm / min。
焊接机器人是一种基于电机控制技术,单片机控制技术,PLC控制技术和数字控制技术的焊接机器人。 焊接机器人主要用于工件的自动进给和切割。 机构,工件站自动转换机构,工件自动夹紧机构,工件焊接过程自动化系统,以及系统集成控制。 右图是装配线上热水器生产线的一套完整的自动焊接机,包括自动上下料,自动上下料,自动夹紧和焊接过程自动化。
上一个浅谈焊接机器人的检查及保养