-

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备

沈阳鹏泰工业装备有限公司
主营:焊接机器人,机器人折弯,机器人码垛,机器人搬运,机器人焊接,机器人切割,机器人喷涂,自动焊接专机,电阻焊专机,焊接变位机,焊缝跟踪,自动化设备 15
15

弧焊机器人
型号:SF6-K1492
弧焊机器人性能参数:
活动半径:1492mm
重复精度:±0.08mm
机器人本体重量:165KG
机器人高度:1369mm
机器人底座尺寸为384*384mm
关节数:6轴
弧焊机器人
全轴采用AC伺服电机驱动,较其节能,运行稳定。响应快
工作环境:95%RH以下(无结露)
手部负载:6KG
应用场景:弧焊、搬运、上下料
机器人本体重量165Kg驱动方式使用AC伺服电机驱动环境湿度95%RH以下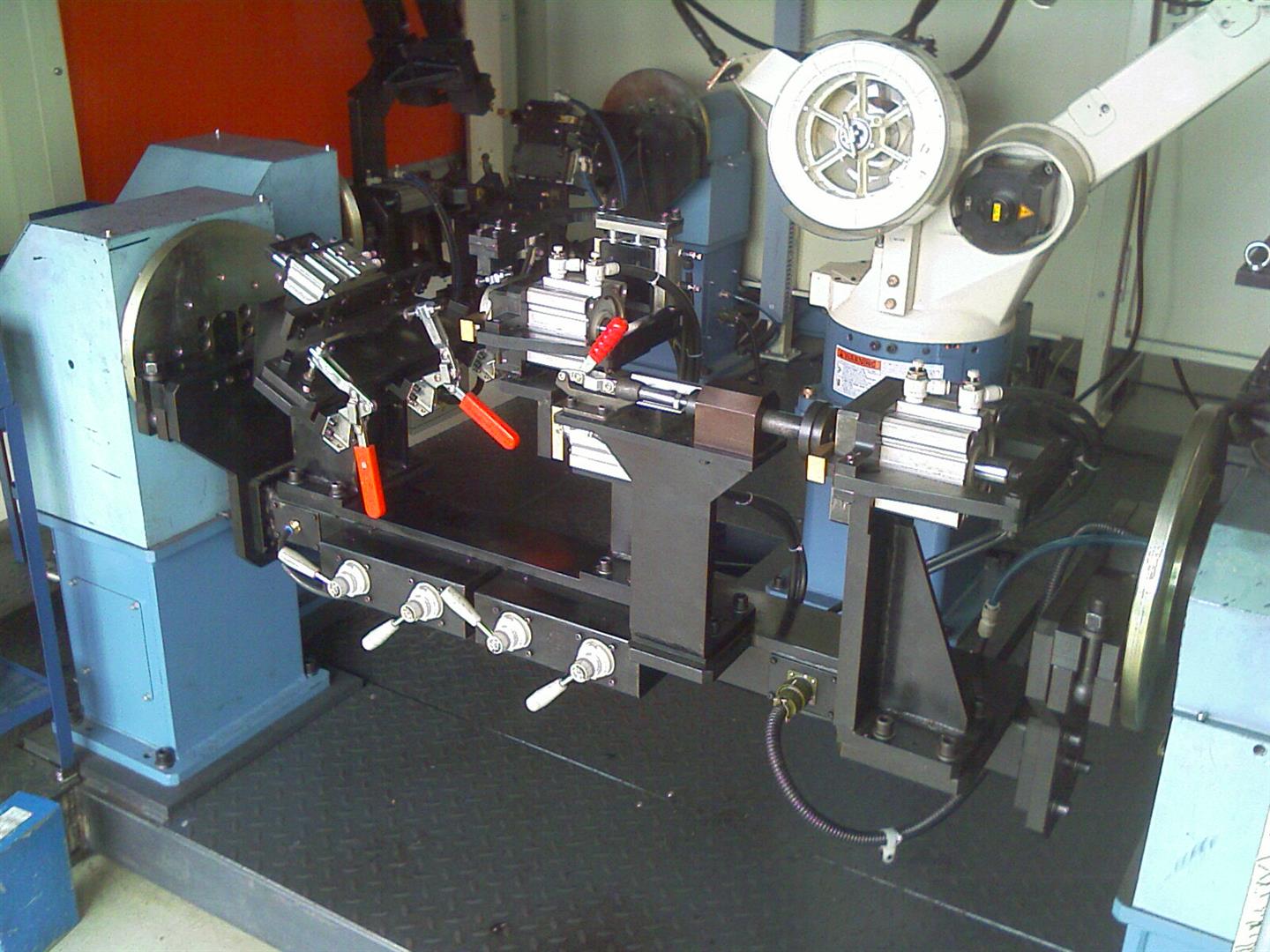
焊接机器人是集机械、计算机、电子、传感器、人工智能等多方面知识技术于一体的现代化、自动化设备。焊接机器人主要由机器人和焊接设备两大部分构成。机器人由机器人本体和控制系统组成。焊接设备以点焊为例,则由焊接电源、焊枪、传感器、修磨器等部分组成。此外,还有相应的系统保护装置。
球坐标型
与圆柱坐标结构相比较,这种结构形式更为灵活。但采用同一分辨率的码盘检测角位移时,伸缩关节的线位移分辨率恒定,但转动关节反映在末端操作器上的线位移分辨率则是个变量,增加了控制系统的复杂性.
工业制造领域中应用较广泛的机器人是焊接机器人,特别是在汽车制造业中,机器人使用量约占全部工业机器人总量的30%,而其中的焊接机器人数量就占去50%左右。